본문 바로가기
연구분야
자율주행분야
Real-Time Tracking Drone
- 연구 개요
- object detector를 이용한 realtime 작업자 추종드론 개발
- 연구내용 및 성과
- 실시간 드론 추종 모델 개발
- 딥러닝 기반의 Color Coding을 적용해 기존에 드론 추종이 가진 occlusion 문제에 강건한 모델 개발
- Centroid Tracking을 통해 일정한 거리를 유지하며 드론이 추종 대상의 움직임 속도에 맞춰 추종하도록 개발
- Multithreading으로 프레임 처리 속도 실시간에 적합하게 개선
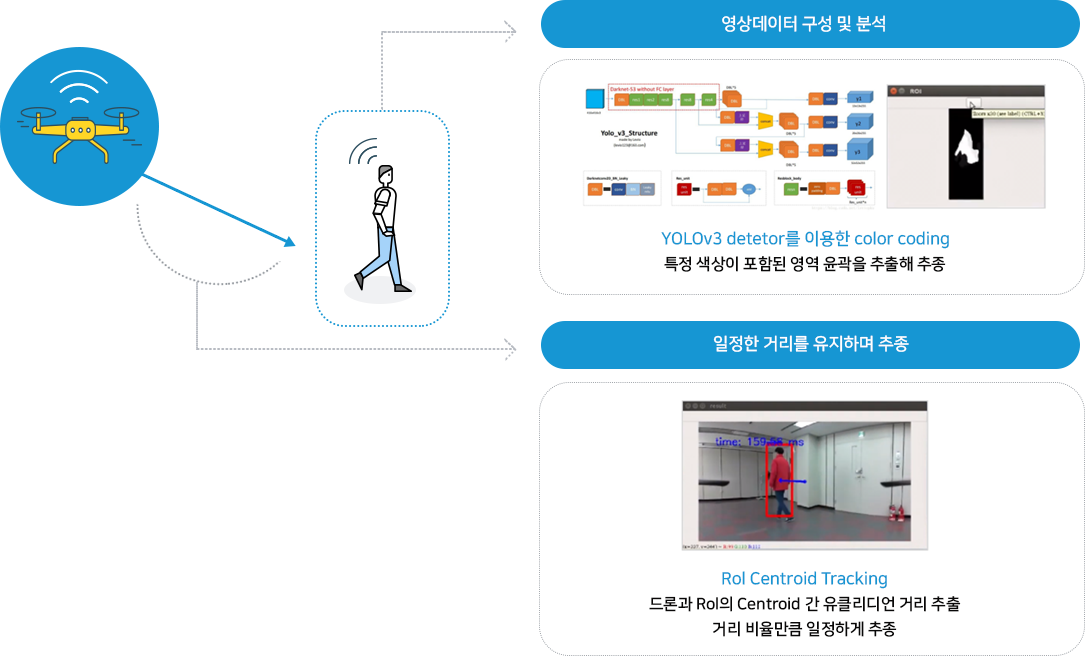
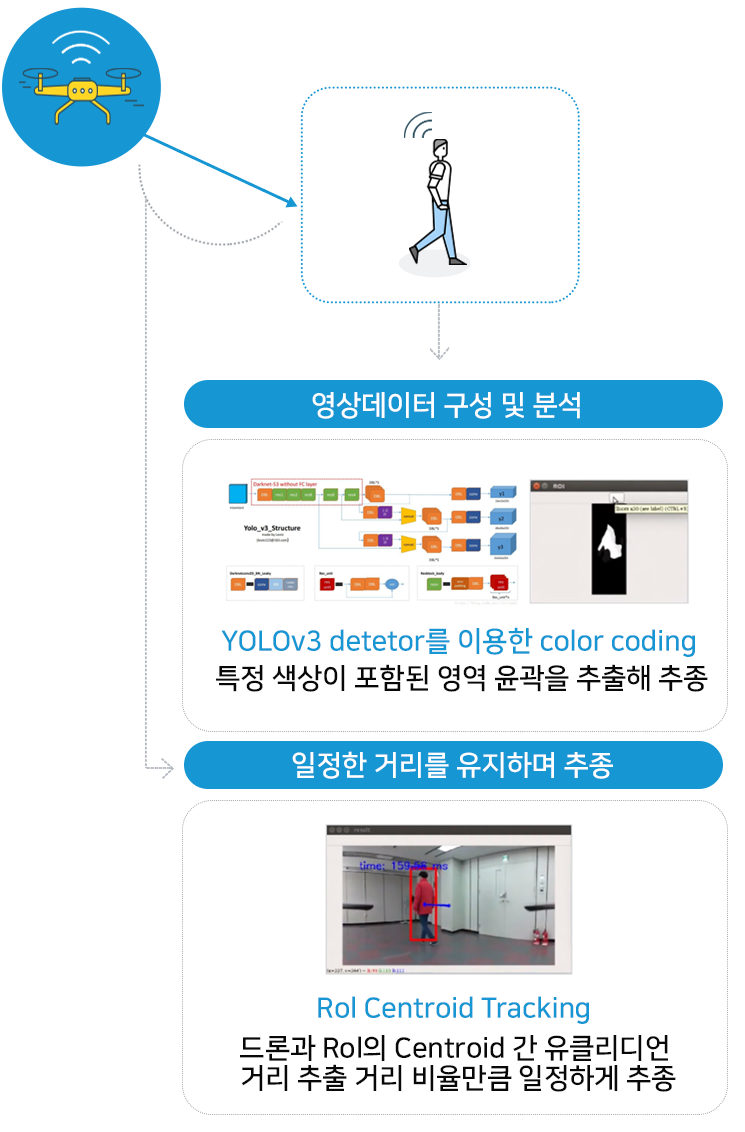
- 영상데이터 구성 및 분석
- YOLOv3 detetor를 이용한 color coding
- 특정 색상이 포함된 영역 윤곽을 추출해 추종
- 일정한 거리를 유지하며 추종
- Rol Centroid Tracking
- 드론과 Rol의 Centroid 간 유클리디언 거리 추출 거리 비율만큼 일정하게 추종
- 응용분야
- 산업현장 작업 보조 : 지정된 사람이나 장소에 정확히 물류를운반, 소방현장에서 소방관을 추종하며 현장 중계
- 산업용 로봇 : 생산현장에서 작업자를 따라다니는 작업 보조 로봇
Object Detection과 음성 인식을 통한 자율주행 RC Car
- 연구 개요
- CNN과 YOLO 모델 기반 자율주행 RC Car 개발
- 연구내용 및 성과
- 조향 예측 CNN모델 개발
- 카메라를 통해 들어온 이미지를 직진, 우회전, 좌회전 3가지 방향으로 예측
- Object Detection모델(YOLO)을 활용하여 표지판 검출
- 구글 Cloud Speech-to-Text API를 활용한 음성인식
- 초음파 센서를 이용한 장애물 인식
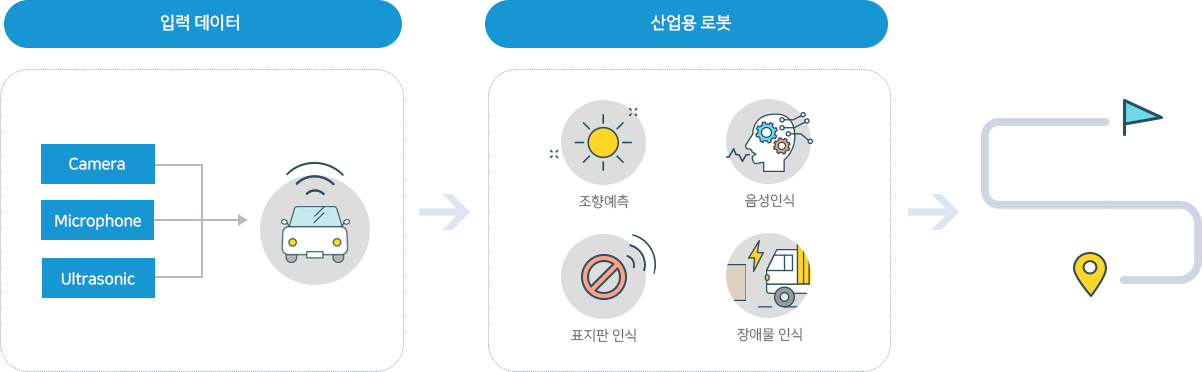
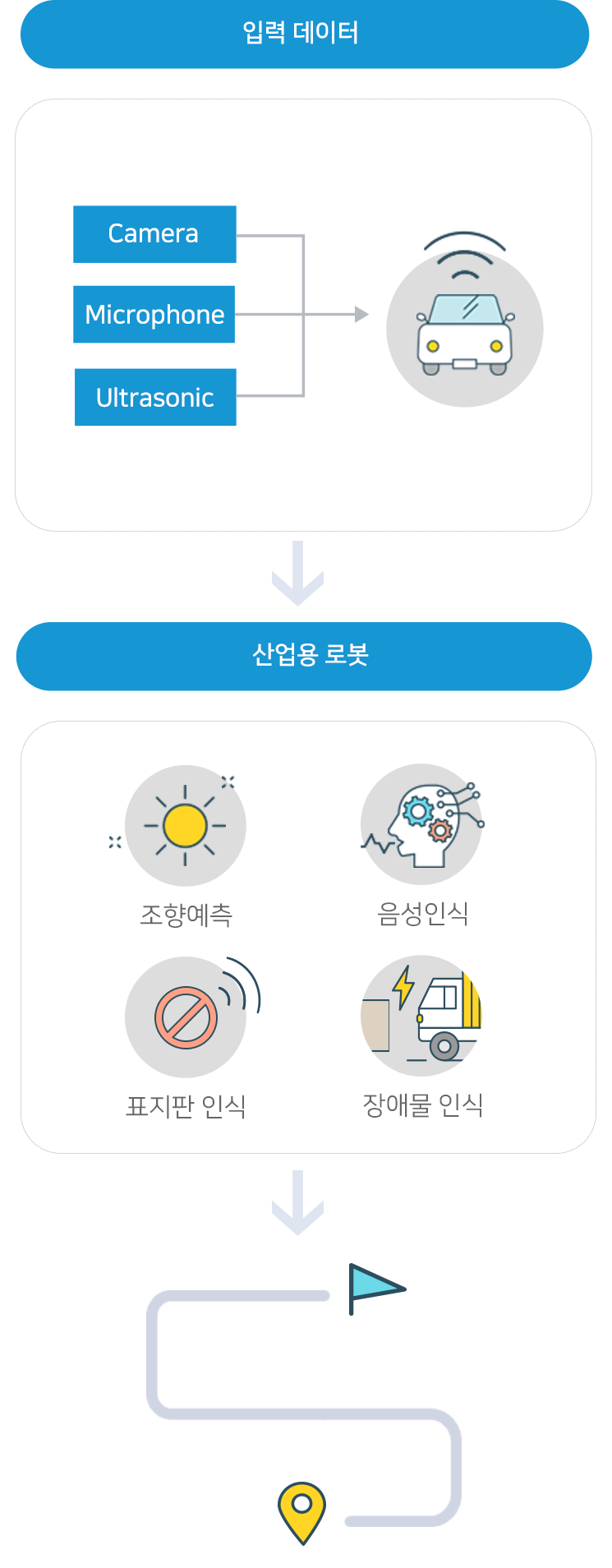
- 입력데이터(Camera, Microphone, Ultrasonic) → 산업용로봇(조향예측, 음성인식, 표지판인식, 장애물인식)
- 모델 성능 평가